Aligning A Subwoofer With Full-Range Loudspeakers
Aug. 07, 2012, by Charlie Hughes
출처 : http://www.prosoundweb.com/article/optimally_aligning_subwoofers_with_main_loudspeakers/
PA 시스템의 설정에 있어서 어려움을 겪는 과정 중 하나가 서브우퍼와 메인 시스템과의 얼라인먼트 과정일 것입니다. 이를 위해서 스피커 제조사, 매니지먼트 제조사, 측정장비, 소프트웨어 제조사들이 다양한 장비나 시스템을 개발하고 있음에도 여전히 쉽지 않은 과정으로 남아 있습니다. 이에 대한 내용을 정리하는데도 책 몇 권 정도 분량이 쉽게 나올 것 같네요. 저자는 이에 대한 기본적인 개념을 설명하고 그룹 딜레이를 이용한 딜레이 값 선정 방법을 제시하고 있습니다. 현장에서는 엔지니어마다 고유의 설정값을 찾고 그 값을 활용하는 노하우들이 있을 것입니다. 당연히 이 글에서 제시하는 내용이 모든 경우에 적용되지도 않을 것이며, 실제 측정이 되지 않는 경우도 많이 있을 것입니다. 그럼에도 이 기사에서 제시하는 원리를 이해하고 멀티웨이 스피커 시스템의 설정에 접근한다면 더 쉽고, 정확한 설정을 할 수 있고 환경의 변화와 설정값의 변화에 따른 최종 출력 음질에 대한 판단에도 도움이 되리라 생각합니다. 그룹딜레이나 몇가지 용어의 경우에는 좀 자세한 설명을 추가하였으며, 직역보다 이해가 쉽도록 최대한 풀어 번역하였습니다. 궁금하신점이나 오류는 항상 이 기사 끝에 있는 웹사이트나 블러그로 연락 주시기 바랍니다.
-----------------------------------------------------------------------------------------------------------------------------------------------------
저는 "어떻게 풀레인지 라우드스피커 시스템에 서브우퍼를 잘 설정할 수 있을까요?" 라는 질문을 많이 받아 왔습니다. 저는 과연 이에 대한 해답을 얻을 수 있을지 알아보기 위해 이 문제를 탐구해 보는 것이 대단히 흥미로울 것 같다는 생각을 했습니다.
저역 주파수 대역을 더 크게 확장하기 위해서 라우드 스피커 시스템에 서브우퍼를 추가하는 작업은 통상 세가지 주요 요소를 고려하게 됩니다.
-
서브우퍼와 풀레인지 스피커 사이의 상대적인 주파수 대역 (크로스오버)
-
서브우퍼와 풀레인지 스피커 사이의 의 상대적인 출력 레벨 (게인)
-
서브우퍼와 풀레인지 스피커로부터 나온 출력 신호의 상대적인 도착 시간 (딜레이)
마지막 요소가 아마도 가장 어려운 요소일 것 같습니다. 그리고 이 요소가 우리가 앞으로 주로 살펴볼 내용이 되겠습니다. 우리는 또한 첫번째 요소인 크로스오버에 대해서도 간단히 살펴보도록 하겠습니다.
우리가 앞으로 살펴볼 이 두 가지 요소를 잘 이해하고 다룰 수 있게 된다면 두 번째 요소는 그다지 큰 문제가 되지 않을 것 같군요.
라우드스피커들은 태생 자체가 밴드 패스 장치들이 됩니다. 왜냐하면 하나의 라우드 스피커 시스템을 구성하는 스피커 드라이버 하나하나들이 자신들에 맞는 주파수만을 재생하게 되기 때문입니다. 측정을 쉽게 하고, 또 어떤 일이 생기는 지를 그래프를 통해 알아 보기 쉽게 하기 위해서 저는 하이패스와 로우패스 필터들을 실제 라우드스피커의 각 드라이버들 대신에 사용할 것입니다. 결과는 마이크 위치에 대한 내용만 빼면 완전히 같을 겁니다.
앞으로 다룰 예제에서 실제 마이크를 사용하지 않고 오직 전기적인 측정만을 진행할 것이기 때문에 스피커의 위치를 옮긴다는 것은 불가능합니다. 이러한 이동은 고역대의 측정에 특히나 민감하게 되는데, 라우드스피커의 지향성에 대한 응답 특성 때문에 서로 다른 위치에 있는 장치의 측정된 응답 특성의 차이가 나게 되기 때문입니다. 저역대에서 대부분 무지향 특성을 갖는 장치에 대해서는 이러한 현상이 문제가 되지는 않을 것입니다. 즉, 저역 드라이버들에 대해서는 스피커가 위치가 문제가 되지 않지만, 고역대 드라이버들은 이러한 부분에 민감하게 반응합니다.
또 하나 고려해야 할 점이 있는데, 이는 측정 오차를 도출할 수도 있는 측정 마이크의 위치에 대한 점입니다. 이 마이크 위치는 우리가 예제에서 측정하고자 하는 두 개의 테스트 장치 (저역 드라이버와 풀레인지 드라이버)들로부터 측정 마이크(혹은 청취자의 귀)까지의 경로의 길이에 변화를 줄 수 있는 잠재적인 요소이기 때문입니다. 한곳의 마이크 위치에서 아마 합성신호의 가장 좋은 결과 값을 얻을 수 있을 것입니다.
크로스오버 대역 주파수에서 해당 주파수의 1/2 파장에 의해 경로의 길이 차이가 발생하는 다른 위치에서는 두 개의 드라이버 응답 특성이 합해질 때, 신호의 왜곡(캔슬레이션)이 발생 할 것입니다. 실제 현장에서 측정할 때는 측정마이크들을 신호 크기와 도착 시간의 차이가 그 공간의 대부분의 곳에서 비슷한 값을 갖는 위치에 배치해서 측정된 값이 측정하는 지역의 대부분을 커버할 수 있도록 하는 것이 좋습니다.
자, 이제 60Hz~14KHz대역을 잘 재생하는 풀레인지 클러스터를 가진 가상의 시스템을 상상해 봅시다. 우리는 이 클러스터에서 물리적으로 어느 정도 떨어진 거리에 서브우퍼를 추가하려고 합니다. 이 서브우퍼는 30Hz이하 까지도 잘 재생해줍니다. 이 두 개의 스피커의 응답특성 그래프를 아래 그림1에서 볼 수 있습니다.
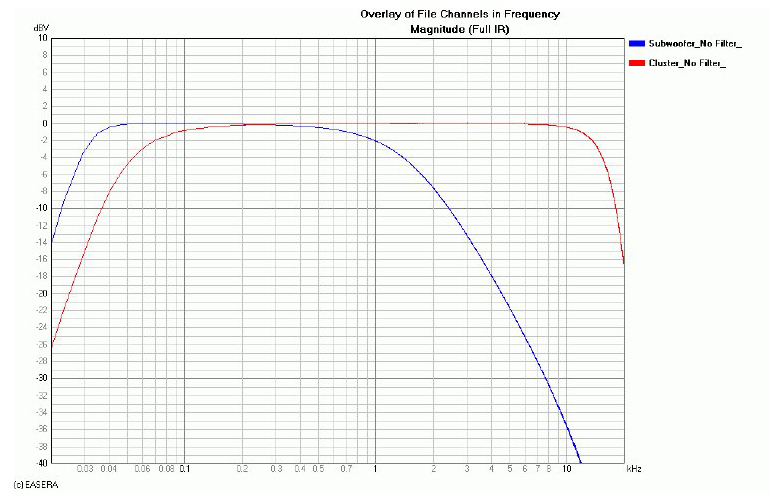
그림1 – 각 시뮬레이터용 드라이버에 대한 개별 주파수별 신호크기 응답 특성
우리는 100Hz에서 4차 Linkwitz-Riley필터의 크로스오버를 스피커 얼라인먼트에 사용하려고 합니다. 우리는 서브우퍼에서 대해서는 100Hz 주파수에 4차 Linkwitz-Riley 로우패스 필터를 적용할 수 있는데, 왜냐하면 이 서브우퍼의 응답 특성을 보면 원하는 크로스오버 대역(100Hz) 윗부분에서도 꽤 평탄하기 때문에 우리는 서브우퍼의 자연적인 특성을 고려하지 않고 로우패스 필터만을 바로 적용할 수 있습니다.
그렇지만 풀레인지 클러스터에 대해서는 그렇게 간단히 적용되지 않습니다. 이 클러스트의 출력의 응답특성을 살펴보면 크로스오버 대역(100Hz근처)에서 이미 주파수 응답 특성이 감쇄되기 시작하네요. 이제 우리는 클러스터의 이러한 자연적인 주파수 응답 특성과 결합했을 때, 100Hz의 컷오프주파수 (Fc ; Cutoff Frequency ; 필터가 적용되는 주파수 값으로 통상 -3dB 줄어드는 지점을 의미함)에서 우리가 원하는 어쿠스틱 응답 특성을 얻을 수 있는 전기적인 필터 (여기에선 4차 Linkwitz-Riley)를 적용해야 할 필요가 있습니다.
그림2는 필터가 적용되지 않은 자연적인 클러스터의 응답특성과 목표로 하는 Linkwitz-Riley 응답특성 그리고, 필터를 거친 이후 원하는 Linkwitz-Riley응답 특성을 얻은 클러스터의 응답특성을 보여주고 있습니다. 목표로 하는 응답 특성을 얻기 위해서 우리는 3차 Butterworth 하이패스 필터를 115Hz에서 걸어 주었습니다.

그림2 – 필터 없는 클러스터의 응답특성(청색), 목표로 하는Linkwitz-Riley 응답특성 (녹색), 3차 Butterworth 하이패스 필터를 걸어준 클러스터의 응답특성(적색)
원하는 응답특성에 더 잘 부합하는 주파수 응답특성을 얻기 위해서는 좀 더 낮은 컷오프주파수 특성의 필터와 파라메트릭 EQ 필터를 써야만 할 것 같습니다. 그렇지만 위에서 얻은 응답 특성도 우리가 원하는 특성을 만족할 만큼충분히 비슷하네요.
앞에서 얻은 두 장치의 출력이 결합하면 우리는 다음의 그림3과 같은 응답 특성을 얻게 됩니다. 그런데 합해진 크기에 대한 응답 특성은 전혀 우리가 원하는 바가 아니군요. 뭔가가 신호를 왜곡 시키는 것이 분명합니다. – 캔슬레이션이 생겼군요.
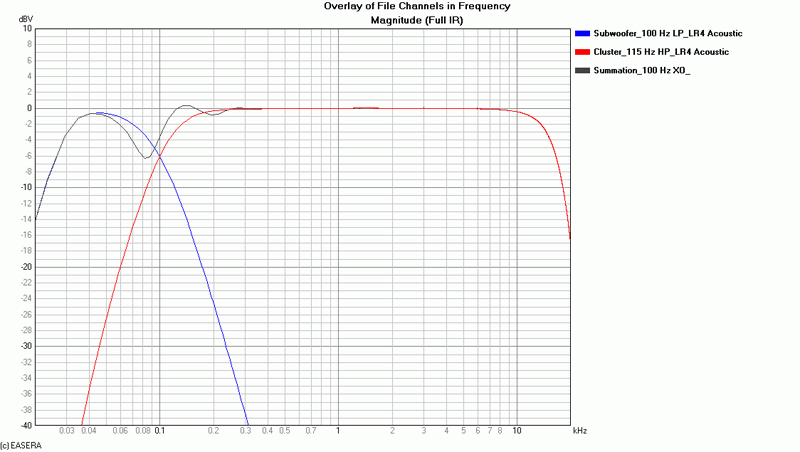
그림3 – 개별 장치의 재생 대역에서의 크기에 대한 응답 특성과 합해진 전체 대역의 응답 특성
우리가 보기엔 각 장치(드라이버, 유닛)에 대한 Linkwitz-Riley 어쿠스틱 주파수 응답 특성이 합해지면 평탄한 응답 특성이 나와야 할 것 같습니다. 그런데 그렇지 않다는 것은 이러한 합성 신호를 시간축에서 보면 두 개의 장치가 잘못된 얼라인먼트가 된 문제가 있음을 보여주는 것 같습니다.
다음 그림4에서 재생 주파수 대역에서의 ETC(Envelope Time Cureve)그래프를 보면 이 두 개의 장치가 정확히 일치하지는 않는다는 것을 볼 수 있습니다. 클러스터의 신호(적색)가 시간축에서 서브우퍼 신호(청색)의 도착 시간보다 더 앞쪽에 있어서 더 빨리 도착하게 되는 셈이니 우리는 이 풀레인지 클러스트에 딜레이를 걸어줄 필요가 있겠군요. 그렇지만 딜레이 값을 얼마나 걸어야 할까요?
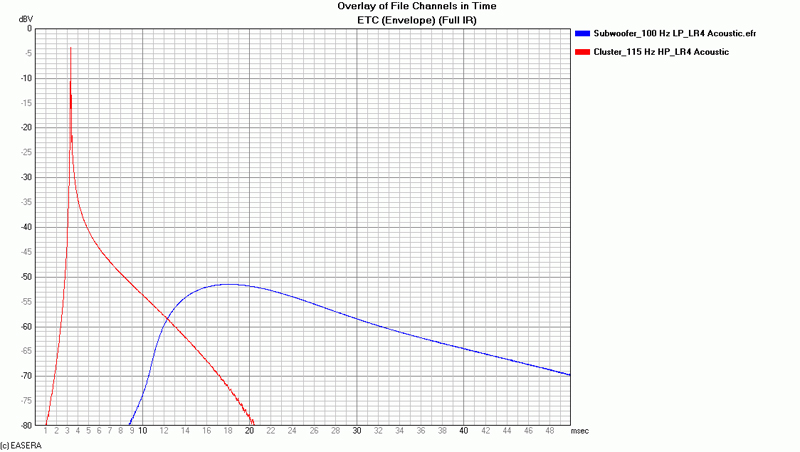
그림4 – 재생 대역에서의 개별 ETC
우리가 이 그래프에서 서브우퍼와 클러스트의 피크 값끼리 얼라인먼트를 맞추기로 한다면 우리는 14.7mS를 클러스터에 딜레이로 걸어주어야 합니다. 서브우퍼의 피크값에서의 시간이 18mS정도이고 클러스의 피크값에서의 시간은 3.3mS정도 이기 때문입니다. (18-3.3=14.7)
다른 방법으로는 서브우퍼의 ETC의 앞쪽 경사면에 클러스터 그래프의 앞쪽 경사면을 맞추도록 해보면 얼마나 딜레이를 걸어주어야 하는지 알아볼 수 있을 것 같은데, 이 경우에는 대략 10mS정도를 클러스터에 걸어 주면 되겠네요.
두 가지 방법에 대한 주파수축과 시간축에 대한 그래프를 그림5와 그림6에서 볼 수 있습니다.
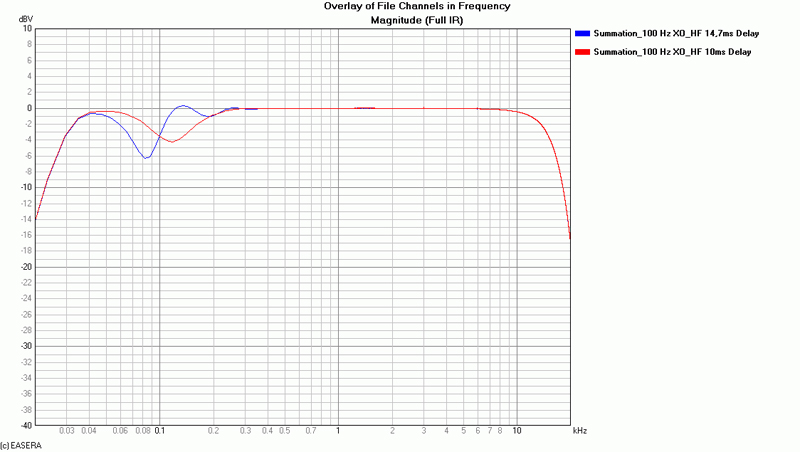
그림5 – 10mS(적색), 14.7mS(청색)을 클러스터에 딜레이 값으로 주었을 때의 주파수 축에서의 크기에 대한 응답 특성
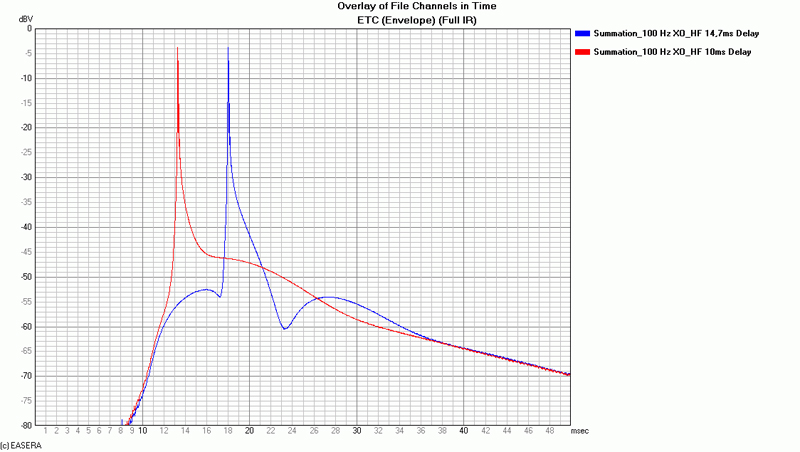
그림6 – 10mS(적색), 14.7mS(청색)을 클러스터에 딜레이 값으로 주었을 때의 시간 축에서의 크기에 대한 응답 특성
주파수 축에서는 두 가지 모두 통상 좋은 신호의 합성(평탄한 특성)이라고 생각할 만 하지는 않아 보입니다. 시간 축에서 보니 좀 더 짧은 딜레이 값이 긴 값에 비해 더 이상적인 값에 근접할 것 같아 보입니다.
우리는 시간과 주파수 양 축 모두에서 응답 특성을 최적화 하기 위해 다른 딜레이 시간을 예상해볼 수 있을 것 같습니다. 다행히도 더 좋은 방법이 있네요.
현재 놓인 문제는 우리가 서브우퍼의 출력에서 단지 저역 주파수에 대한 정보만 가지고 있다는 점입니다. 그런데 이게 왜 문제라는 거죠?
다음의 식에서:
Δt =1/ Δf
where Δt is time resolution and Δf is frequency resolution, we can see that high frequency resolution (small vale of Δf) will yield low time resolution (large values of Δt).
왼쪽 Δt항은 시간에 대한 해상도이고 이 값이 작다면 더 짧은 시간 정보를 얻을 수 있어서 더 높은 해상도를 얻을 수 있음을 의미합니다, 오른쪽 1/ Δf항은 주파수에 대한 해상도이며 이 값이 작다면 역시 더 작은 값을 얻을 수 있어서 더 높은 해상도를 얻을 수 있음을 의미합니다. 높은 주파수 해상도(Δf 값이 작다는 거죠)는 낮은 시간 해상도 (큰 Δt 값)를 도출한다는 점을 볼 수 있습니다.
우리는 클러스터를 어느 시점에 일치 시켜야 하는 지를 알기 위해서, 서브우퍼의 출력에서 (더 높은 Δf, 즉 더 정밀한 주파수 해상도에 부합하는) 더 높은 주파수 대역이 필요합니다.
할 수 있다면 우리는 출력 신호에서 원하는 더 높은 주파수 값을 얻기 위해서 서브우퍼에 걸려 있는 로우패스 필터를 바이패스 할 수도 있습니다. 이렇게 하면 서브우퍼에서 나오는 에너지의 도착시간을 더 정확히 정하는데 도움을 얻을 수 있을 것입니다.
그렇지만 우리가 이렇게 할 수 없거나, 아니면 그렇게 하더라도 충분한 시간 해상도를 얻을 수 없다고 가정해봅니다.
그렇다면 우리에게 필요한 것은 고주파수 정보 없이 정확한 시간 축에 대한 정보를 얻는 방법 뿐입니다. 이 방법은 불가능한 것처럼 보이지만, 사실 시간 축에 대해서만 그렇습니다. 주파수 축에서는 꽤 정확하게 상대적인 시간 정보를 산출해내는 기준이 있습니다.
이것이 바로 그룹딜레이(group delay, 군지연)입니다. 그룹딜레이는 수학적으로 정의가 되어 있는데, 주파수에 따른 위상 변이의 비율에 음수를 취한 값입니다. 이는 위상이 변하는 값을 주파수별로 나누어서 구하게 됩니다. 일반적인 필터의 특성상 어떤 필터가 적용되면 이 필터에 들어간 신호가 출력으로 나올 때 시간 지연이 발생하는데 이는 위상 변이로 나타납니다. 그런데 100Hz – 1KHz 밴드패스 필터를 예를 들어보면 이 필터에서 발생하는 시간 지연은 이 필터를 통과하는 신호의 주파수와 상관없이 동일하게 적용됩니다. 그런데 주파수가 다르면 같은 시간 지연 값이 적용될 때, 그 위상 변화는 주파수마다 달라지게 됩니다. 100Hz가 한바퀴 도는데 걸리는 시간과 1KHz가 한바퀴 도는 걸리는 시간이 다르기 때문에 여기에 같은 시간이 더해지면 실제 위상이 변한 값은 두 주파수에서 다르게 되고, 이 변화를 특정 값으로 계산하는 것이 그룹딜레이가 됩니다. 그래서 그룹딜레이 식에는 주파수(ω)정보가 들어갑니다.
τg = −dφ / dω
그림3과 그림4는 개별 재생 대역에서의 같은 측정 값에 대한 서로 다른 시각(관점, 뷰, 도메인)을 보여주는 것입니다. 만약 우리가 그림7에서 그림3,4와 같은 데이터로부터 그룹 딜레이를 바로 본다면, 우리는 몇몇 쓸만한 정보를 더 얻을 수 있습니다.
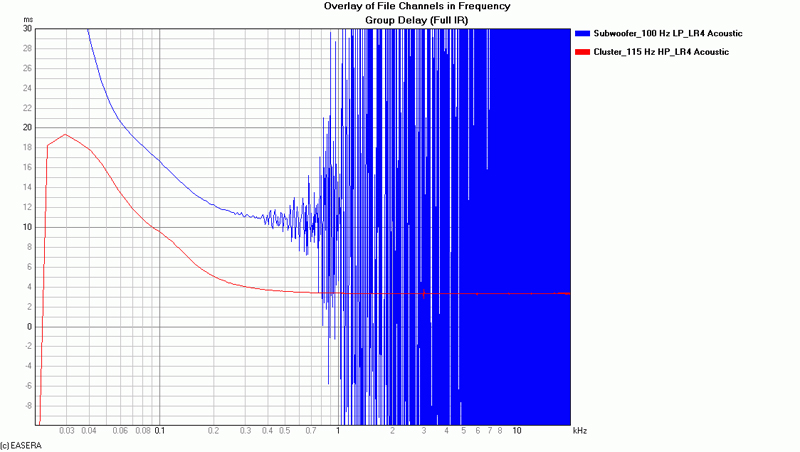
그림7 – 크로스오버 필터가 적용된 서브우퍼(청색)과 클러스터(적색)의 그룹 딜레이
각 커브에서의 고주파수대역에서의 안정화된 값은 그 장치에서 나온 신호가 도착하는 시간을 주파수 별로 표시합니다.
이 커브에서 우리는 클러스터의 도착 시간은 대략 3.3mS이라는 것을 알 수 있습니다. 대략 1KHz 대역 이상의 값을 보면 그 정도 값을 유지하는 군요. 이는 그림4의 ETC값과도 잘 맞습니다.
그런데 고주파 대역에서 보이는 서브우퍼의 커브의 흔들림 때문에 신경 쓰지는 않아도 됩니다. 이 흔들림은 400Hz 이상 대역을 측정할 때의 아주 낮은 S/N(signal to noise, 신호대 잡음비)때문에 발생합니다. 그림3을 참조해보면, 서브우퍼의 출력은 200Hz에서 벌써 -24dB 이하임을 알 수 있습니다.
우리가 4차 필터를 사용하고 있기 때문에 400Hz에서는 -48dB이하가 되고 더 가파르게 감소됩니다. 이러한 이유로 고주파 대역에서 SNR문제가 생기는 것은 의심의 여지가 없습니다.
우리는 서브우퍼의 커브에서 300Hz 정도를 보면 이 스피커의 고주파수 한계 대역에서의 그룹딜레이 값을 얻을 수 있는데 대략 11.0mS정도 되는 것으로 보이는군요. 같은 주파수에서 그룹딜레이를 비교하기 위해 이 주파수(300Hz) 대역에서의 클러스터의 그룹딜레이를 확인해보면 대략 3.9mS정도네요. 이 값은 더 높은 주파수 대역에서의 3.3mS와는 좀 차이가 납니다.
그리고 이 그룹딜레이는 하이패스 필터와 이 장치(서브우퍼)의 자연적인 하이패스 응답특성 때문에 생기는 위상 변위에 의해서도 발생합니다. 서브우퍼에 사용된 로우패스 필터 역시 유사한 위상 변위를 만들어냅니다. 결론적으로 우리가 충분한 SNR을 가진 고주파수 대역에서 두 장치의 그룹딜레이를 측정한다면 비슷한 그룹 딜레이 차이를 볼 수 있을 것입니다.
11.0mS와 3.9mS의 차이를 취해서, 우리는 이제 이 클러스터에 적용할 딜레이 값으로 7.1mS 값을 쓸 수 있게 되었습니다. 이 값을 적용하면 그림8과 그림9에서 두 출력의 합성신호의 응답 특성을 개별 신호들의 응답 특성과 같이 볼 수 있습니다. 이 결과는 거의 완전히 우리가 원하는 바와 같네요.

그림8 – 개별 장치의 재생 대역에 대한 크기의 응답 특성과 클러스터에 7.1mS 딜레이 값을 적용하여 합성된 신호의 응답 특성
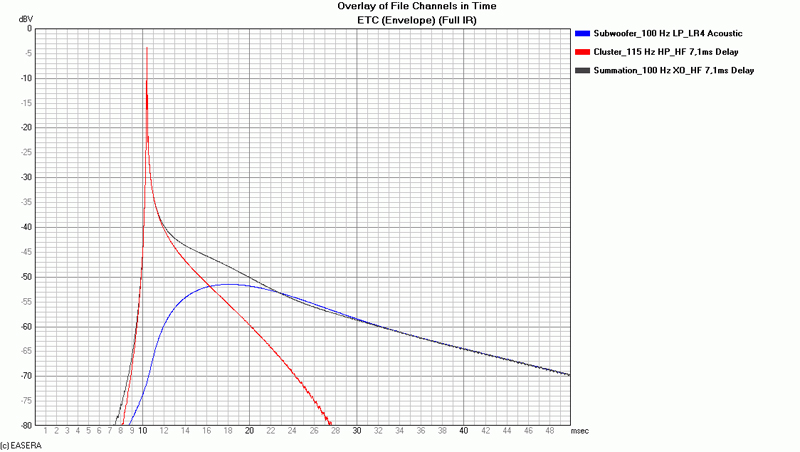
그림9 – 개별 장치의 재생대역에서의 ETC 커브와 클러스터에 7.1mS 딜레이 값이 적용된 합성 신호의 특성 커브
그림8의 합성 신호의 응답 특성을 보면 150Hz 정도에서 0.5dB미만의 차이가 보이네요. 이 정도의 오차는 클러스터의 자연적인 출력 특성과 우리가 목표로 한 Linkwitz-Riley 필터 특성이 정확히 맞지 않아서 생긴 오차입니다. (그림2를 참조하세요)
로우패스 필터의 응답특성이 어떻게 '분명히 구분되는' 도착 시간에 영향을 끼치는지를 살펴보는데 도움을 얻는데 흥미를 보일만한 한가지 요소가 더 있습니다. 제가 '분명히 구분된다'라고 언급했는데 왜냐하면 이 구분은 도착시간이 변경될 때만 드러나기 때문입니다. 그림10과 그림11에서 4차 butterworth 로우패스 필터를 사용한 경우의 ETC와 IR 특성 그래프를 볼 수 있습니다.
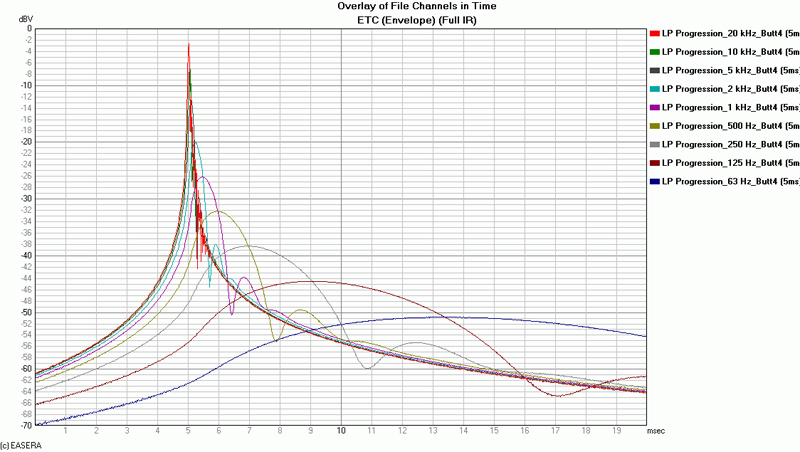
그림10 – 서로 다른 컷오프 주파수 특성(Fc)을 가진 로우패스 필터의 ETC 특성
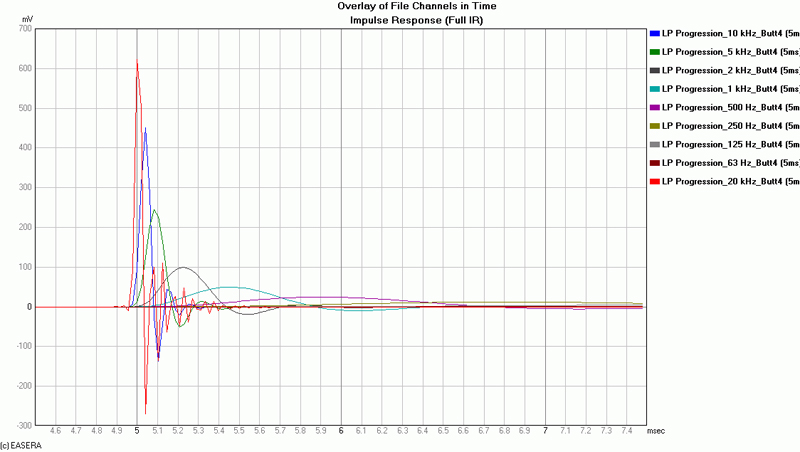
그림11 – 서로 다른 컷오프 주파수 특성(Fc)을 가진 로우패스 필터의 IR 특성
이 특성 그래프들 사이의 유일한 차이는 적용한 필터의 컷오프 주파수(Fc, -3dB 되는 지점)입니다. 이 모든 필터들에 대한 실제 도착 시간은 5mS로 동일합니다. 이 필터와 같이 사용될 하이패스 필터의 도착시간이 5mS정도라면 이 그래프 상의 상대방 로우패스 필터와 같이 적절하게 잘 합성되어서 좋은 결과를 만들 수 있을 것 같습니다.
만약 하이패스 필터를 거친 신호의 도착 시간이 좀더 지연되어서 5mS 이상 늦어지게 된다면, 우리가 앞서 그림5와 그림6에서 설명한 것과 같이 필터들의 합성에서 오차가 발생하게 될 것입니다.
우리는 어떻게 전기적인 필터의 응답특성이 라우드스피커의 자연적인 응답특성과 결합되어서 합성된 출력에서 원하는 응답특성을 도출할 수 있는지를 살펴보았습니다.
또한 장치의 로우필터 동작 특성 때문에 장치의 실제 도착시간보다 측정되는 도착시간이 어떻게, 왜 더 지연되는지에 대해서도 살펴보았습니다.
이러한 내용을 근거로 우리는 로우패스 필터의 특성으로 인해 장치의 고주파 대역의 출력이 제한되는 상황에서 상대적으로 더 나은 정밀한 정확한 딜레이 값을 찾기 위해 그룹딜레이를 어떻게 사용하는지에 대해 증명해 보았습니다.
저는 누군가가 이러한 기술의 사용법을 발견하기를 기대합니다.
Charlie Hughes는 피베이와 알텍랜싱 사에서 근무하면서 20년 이상을 프로오디오 산업계에서 주요 인사로 여겨져 왔습니다. 그는 현재 컨설팅, 설계, 측정 서비스 등을 제공하는 NC의 샤롯데 근처에 위치한 Exceisior Audio Design & Sevices를 이끌고 있습니다. 그는 또한 AES, ASA, CEA, NSCA의 멤버로도 활동하고 있습니다. 추가로 몇 개의 AES와 CEA의 표준화 위원회의 멤버로도 활동하고 있습니다.
Translated and edited by Yunsong Sim
Blog : soundoflife.tistory.com
Website : www.hajuso.com (하주소, 하나님이 주신 소리)
'음향, 영상이야기 > Rane_Project' 카테고리의 다른 글
| 오디오 장비에서의 그라운딩과 쉴딩 (2) | 2013.11.25 |
|---|---|
| 피크 전압이 몇 dBu라고? (3) | 2013.04.16 |
| 파워 앰프 너 뭐냐? (2) | 2013.04.05 |
| 얼마나 큰 앰프 출력이 필요할까? (0) | 2013.04.04 |
| 일반적인 소자를 이용한 정확한 게인 스트럭쳐 설정 (0) | 2013.04.03 |